 11.03.2012, 11:29
11.03.2012, 11:29
|
#11 | |
|
Пользователь
Житель форума
Регистрация: 03.11.2009
Адрес: Москва
Марка: Jeep Cherokee XJ: 4L, 242, 1995. - сгорел в бою. (На соревнованиях). Теперь XJ 98, 4L, 231, 31"
Возраст: 58
Сообщений: 2,796
|
Цитата:
Про поворачиваемость здесь можно страниц десять написать, потому что связана она с геометрией и кинематикой подвески и рулевого управления, боковым уводом шин и т.д. Вкратце: 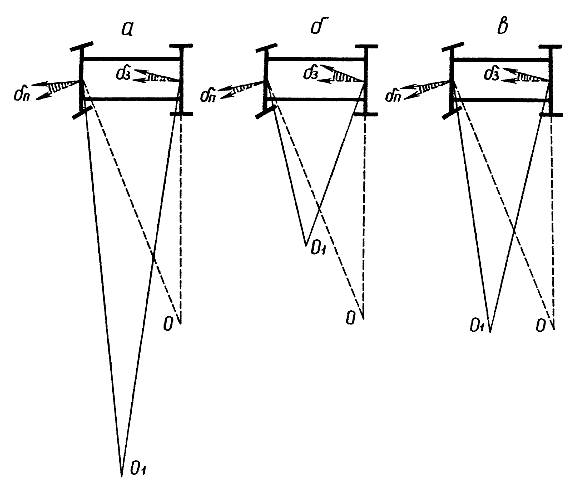 Три случая статической поворачиваемости: δП – угол увода передних колес, δЗ – угол увода задних колес, О — центр заданного радиуса поворота, О1 — центр изменившегося радиуса поворота. Пунктиром показаны направления и радиусы, заданные водителем, сплошными линиями — изменившиеся вследствие увода шин. а — недостаточная поворачиваемость: угол увода передних колес больше, чем задних; радиус поворота увеличился против заданного. б — избыточная поворачиваемость: угол увода передних колес меньше, чем задних; радиус поворота уменьшился против заданного. в — нейтральная поворачиваемость: углы увода передних и задних колес одинаковы, радиус поворота не изменился. Это упрощённо "в статике". Плюс сюда же уводы подвески и рулевого в следствие кинематики и податливости в шарнирах. Как пример рессорная подвеска: http://offroad38.ru/tuning_monstrohod_ressorizad.php Вот здесь интересное обсуждение (рассматривается увод шин, но вообще уводом называется "весь комплекс" - изменение параметров подвески и рулевого управления в динамике). http://beemdoubleu.livejournal.com/199931.html
__________________
Jeep Cherokee XJ: 4L, 231, 31", 1998. Последний раз редактировалось Flak88; 11.03.2012 в 11:37. |
|

|


|










 Древовидный вид
Древовидный вид